
A summary of our early-stage grant work



At the end of 2017 our early stage innovation phase grant came to an end. With funding from Elrha's Humanitarian Innovation Fund and support from Virginia Diodes Inc. and the Geneva International Center for Humanitarian Demining, we were able to develop a millimeter wave radar system capable of capturing images of metal targets buried up to 25cm in sand.
[caption id=attachment_10958" align="alignleft" width="300"]
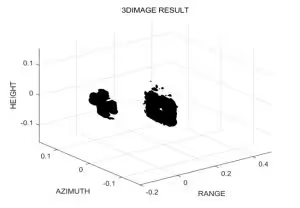
3D holographic image of two targets placed at different ranges (Click for larger image)[/caption]
Our system achieved record performance for a ground penetrating radar and demonstrated a proof of concept for an imaging system for enhanced UXO identification. The previous state of the art in ground penetrating millimeter wave radar had demonstrated imaging of buried mines up to only 5cm. Using a microwave holographic imaging algorithm, we were able to construct 3D images of the buried targets. The figure on the left shows a 3D image of 2 targets at different ranges.
A summary of our findings has been submitted for publication in the IEEE (Institute of Electronic and Electrical Engineering) Transactions on Microwave Theory and Techniques Journal. The IEEE is the world's largest technical professional organisation and an accepted publication will receive wide viewership.
[caption id="attachment_10957" align="alignright" width="400"]

Hex Copter drone with a 1kg payload (Click for larger image)[/caption]
In addition, we developed a HEX copter drone and demonstrated hovering with a payload of 1kg which is significantly greater than the weight of the radar (0.25kg). The figure on the right shows a 1litre bottle of water mounted to our newly developed drone.
These achievements have been major milestones in the road toward our goal. In spite of these successes, there are still several steps ahead before such a platform can be diffused for implementation in the field:
- Miniaturisation of the imaging radar using off the shelf components.
- Mounting of the imaging radar on the HEX copter drone.
- Validation of the system for UXO detection at a qualified humanitarian demining testing site.
Currently, our lab at the University of California Davis is continuing research on collision avoidance for the HEX copter and enabling the autonomous flight control for the drone. We are also continuing imaging studies for enhanced discrimination between natural object such as large rocks and man-made metal objects such as mines or UXOs. New data will continue to be published and we will keep moving forward towards our goal of developing an Autonomous UXO Identification Platform.
Stay updated
Sign up for our newsletter to receive regular updates on resources, news, and insights like this. Don’t miss out on important information that can help you stay informed and engaged.

Related articles




Explore Elrha
Learn more about our mission, the organisations we support, and the resources we provide to drive research and innovation in humanitarian response.